 siggraph
siggraph
siggraph
siggraph

Hands and Bodies (Closing Session)
 Full Conference Pass
Full Conference Pass Full Conference 1-Day Pass
Full Conference 1-Day Pass
Date/Time: 30 November 2017, 04:15pm - 06:00pm
Venue: Amber 3
Location: Bangkok Int'l Trade & Exhibition Centre (BITEC)
Session Chair: Takeo Igarashi, The University of Tokyo, Japan
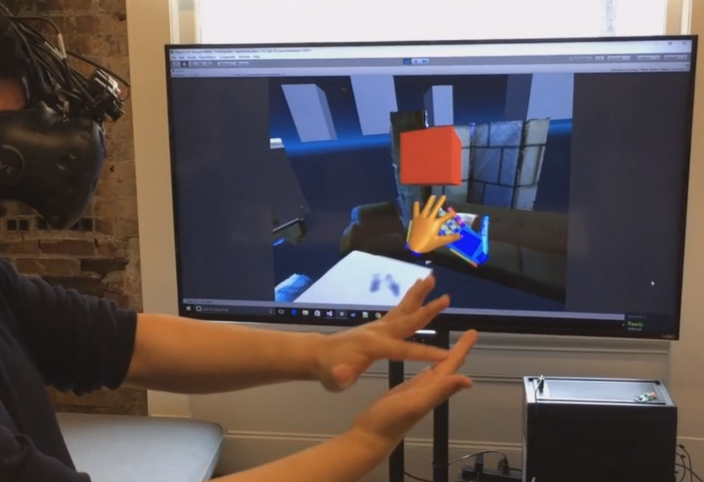
Online Generative Model Personalization
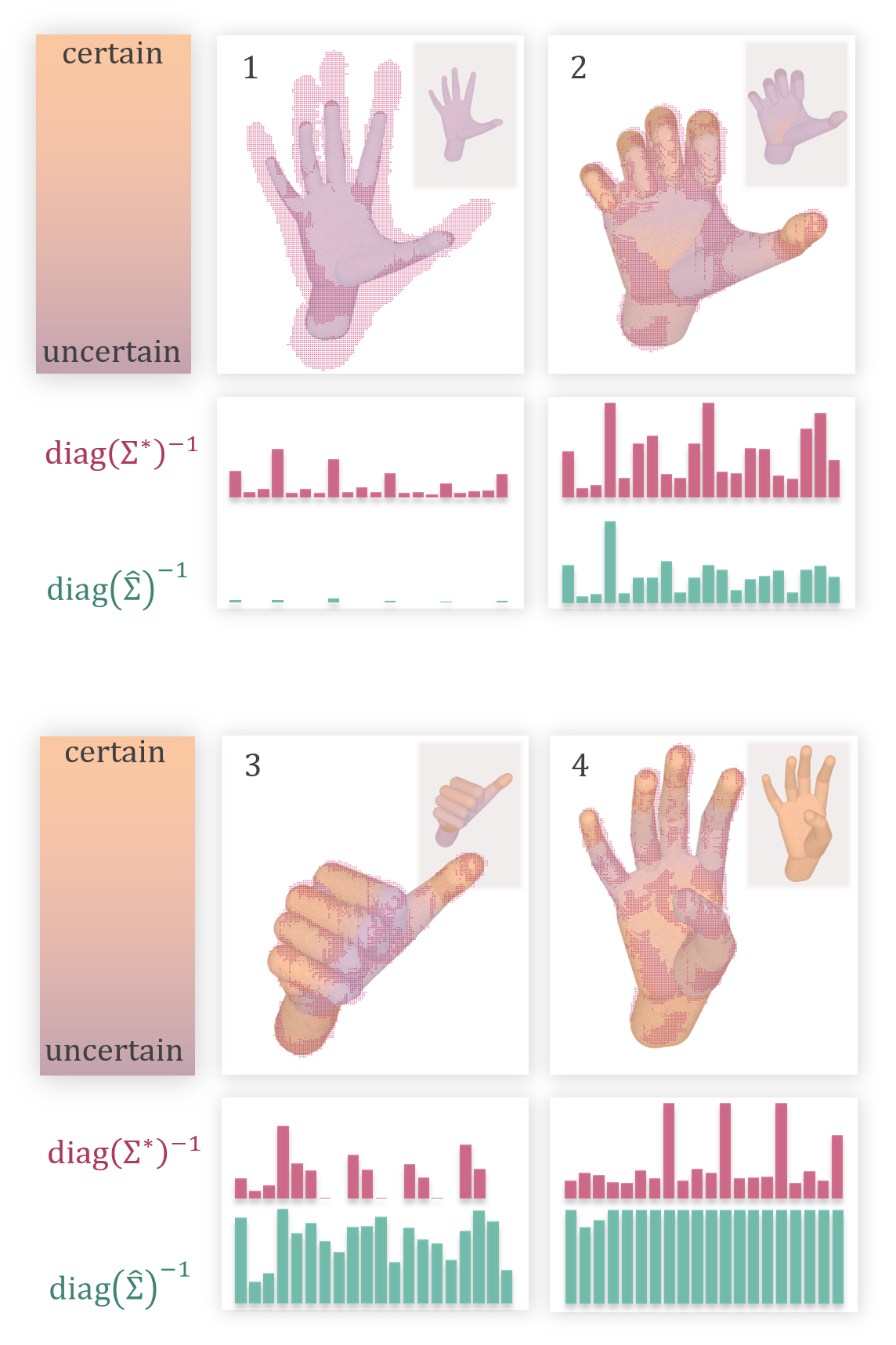
Summary: We present an algorithm for real-time hand tracking and online calibration from depth sensor data. Our method jointly estimates pose and shape in each frame, and determines the uncertainty in such estimates. This allows the algorithm to integrate per-frame estimates over time and build a personalized hand model.
Author(s): Anastasia Tkach, Swiss Federal Institute of Technology, Lausanne (EPFL)
Andrea Tagliasacchi, University of Victoria
Edoardo Remelli, Swiss Federal Institute of Technology, Lausanne (EPFL)
Mark Pauly, Swiss Federal Institute of Technology, Lausanne (EPFL)
Andrew Fitzgibbon, Microsoft Research Cambridge
Speaker(s): Anastasia Tkach, Ecole Polytechnique Fédérale de Lausanne
Articulated Distance Fields for Ultra-Fast Tracking of Hands Interacting
Summary: We demonstrate two handed tracking, recovering complex interactions, at extremely high framerates. The key contribution is an articulated distance function that, for any pose, yields a closed form calculation of both the distance to the detailed surface geometry and the necessary derivatives to perform gradient based optimization.
Author(s): Jonathan Taylor, perceptiveIO, Inc
Vladimir Tankovich, perceptiveIO, Inc
Danhang Tang, perceptiveIO, Inc
Cem Keskin, perceptiveIO, Inc
David Kim, perceptiveIO, Inc
Philip Davidson, perceptiveIO, Inc
Adarsh Kowdle, perceptiveIO, Inc
Shahram Izadi, perceptiveIO, Inc
Speaker(s): Jonathan Taylor, perceptiveIO
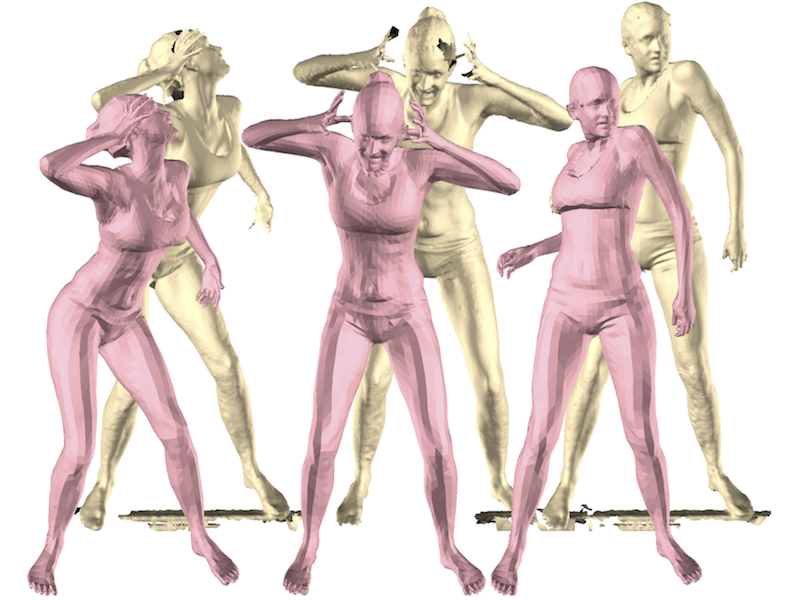
Embodied Hands: Modeling and Capturing Hands and Bodies Together
Summary: We learn a low-dimensional realistic model of hand shape and pose-dependent deformations from high-resolution hand scans of many people and poses. We combine it with a body model and then fit both the body and hand pose, as well as body shape, to noisy 4D scan sequences.
Author(s): Dimitrios Tzionas, Max Planck Institue for Intelligent Systems
Javier Romero, Body Labs, Max Planck Institue for Intelligent Systems
Michael Black, Body Labs, Max Planck Institue for Intelligent Systems
Speaker(s): Javier Romero, BodyLabs
Motion2Fusion: Real-time Volumetric Performance Capture
Summary: We present Motion2Fusion, a state-of-the-art 360 performance capture system that enables *real-time* reconstruction of arbitrary non-rigid scenes, with improved geometric precision, tracking accuracy and efficiency than previous state-of-the-art techniques such as Fusion4D.
Author(s): Mingsong Dou, perceptiveIO, Inc
Sameh Khamis, perceptiveIO, Inc
Sean Fanello, perceptiveIO, Inc
Philip Davidson, perceptiveIO, Inc
Adarsh Kowdle, perceptiveIO, Inc
Christoph Rhemann, perceptiveIO, Inc
Vladimir Tankovich, perceptiveIO, Inc
Shahram Izadi, perceptiveIO, Inc
Speaker(s): Mingsong Dou, perceptiveIO