 siggraph
siggraph
siggraph
siggraph

Multi-View 3D
 Full Conference Pass
Full Conference Pass Full Conference 1-Day Pass
Full Conference 1-Day Pass
Date/Time: 30 November 2017, 02:15pm - 04:00pm
Venue: Amber 3
Location: Bangkok Int'l Trade & Exhibition Centre (BITEC)
Session Chair: Johannes Kopf, Facebook Research, USA
Casual 3D Photography
Summary: We reconstruct 3D photos from casually captured cell phone or DSLR images: a panoramic, textured, normal mapped, multi-layered geometric mesh representation, that can be viewed with full binocular and motion parallax in VR, as well as with a regular mobile device or web browser.
Author(s): Peter Hedman, UCL
Rick Szeliski, Facebook
Suhib Alsisan, Facebook
Johannes Kopf, Facebook
Speaker(s): Peter Hedman, University College London

Soft 3D Reconstruction for View Synthesis
Summary: We present a novel algorithm for view synthesis that utilizes a soft 3D reconstruction to improve quality, continuity and robustness. This provides a soft, local, and filterable model of scene geometry for view synthesis, preserves depth uncertainty from 3D reconstruction, and iteratively improves depth estimation via soft visibility functions.
Author(s): Eric Penner, Google
Li Zhang, Google Inc.
Speaker(s): Eric Penner, Google Inc.

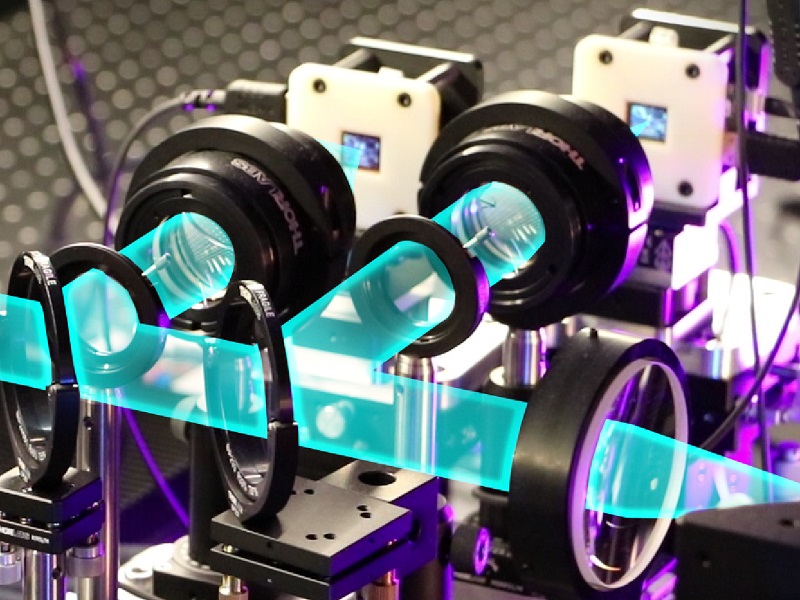
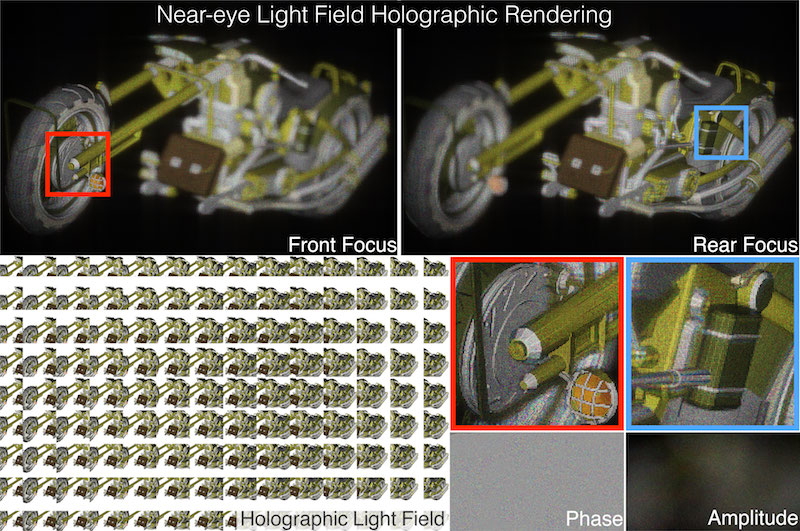
Near-eye Light Field Holographic Rendering with Spherical Waves for Wide Field of View Interactive 3D Computer Graphics
Summary: We present a light field-based CGH rendering pipeline allowing for reproduction of high-definition 3D scenes at interactive rate (4 fps) with continuous depth and support of intra-pupil view-dependent occlusion. Our rendering accurately accounts for diffraction and supports various types of reference illuminations for hologram.
Author(s): Liang Shi, NVIDIA Research, MIT CSAIL
Fu-Chung Huang, NVIDIA Research
Ward Lopes, NVIDIA Research
Wojciech Matusik, MIT CSAIL
David Luebke, NVIDIA Research
Speaker(s): Liang Shi, NVIDIA and MIT CSAIL
Fast Gaze-Contingent Optimal Decompositions for Multifocal Displays
Summary: We present an optimal scene decomposition method for multifocal displays amenable to real-time applications. We incorporate eye tracking to construct an efficient image-based deformation approach to maintain display plane alignment. We build the first binocular multifocal testbed with integrated eye tracking and accommodation measurement.
Author(s): Olivier Mercier, Oculus Research, University of Montreal
Yusufu Sulai, Oculus Research
Kevin MacKenzie, Oculus Research
Marina Zannoli, Oculus Research
James Hillis, Oculus Research
Derek Nowrouzezahrai, McGill University
Douglas Lanman, Oculus Research
Speaker(s): Olivier Mercier, University of Montreal and Oculus Research