 siggraph
siggraph
siggraph
siggraph

3D Scenes
 Full Conference Pass
Full Conference Pass Full Conference 1-Day Pass
Full Conference 1-Day Pass
Date/Time: 29 November 2017, 02:15pm - 04:00pm
Venue: Amber 3
Location: Bangkok Int'l Trade & Exhibition Centre (BITEC)
Session Chair: Kevin (Kai) Xu, National University of Defense Technology (NUDT) China
Adaptive Synthesis of Indoor Scenes via Activity-Associated Object Relation Graphs
Summary: This paper presents a system for adaptive synthesis of indoor scenes via activity-associated object relation graphs. Given an empty room and only a few object categories, our system automatically suggests indoor objects and proper layout to convert an empty room to a 3D scene.
Author(s): Qiang Fu, Beihang University
Xiaowu Chen, Beihang University
Xiaotian Wang, Beihang University
Sijia Wen, Beihang University
Bin Zhou, Beihang University
Hongbo Fu, CIty University of Hong Kong
Speaker(s): Mr. Qiang Fu; Dr. Xiaowu Chen, Beihang University

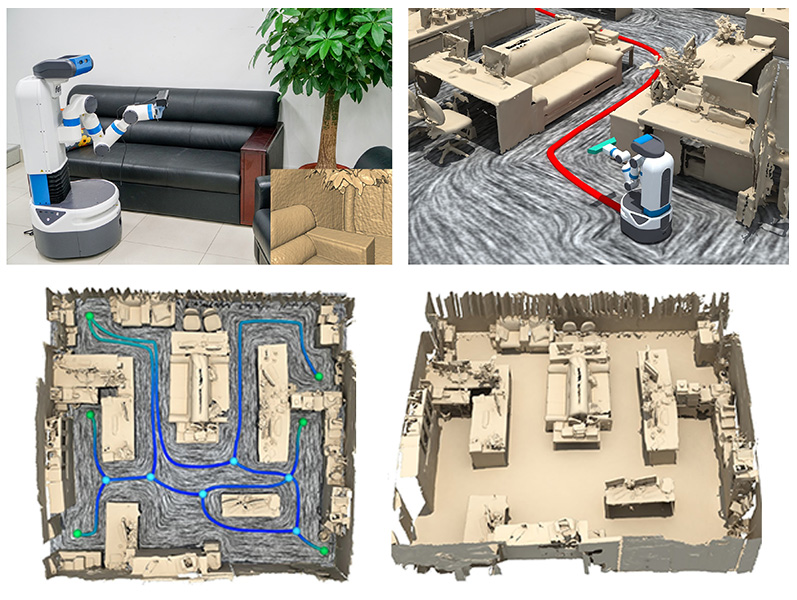
Autonomous Reconstruction of Unknown Indoor Scenes Guided by Time-varying Tensor Fields
Summary: An algorithm for autonomous scanning and reconstruction of unknown indoor scenes with a mobile robot, guided by time-varying 2D tensor fields.
Author(s): Kai Xu, Shenzhen University and NUDT
Lintao Zheng, NUDT and Shenzhen University
Eugene Zhang, Oregon State University
Matthias Niessner, Stanford University
Oliver Deussen, University of Konstanz
Daniel Cohen-Or, Tel Aviv University
Hui Huang, Shenzhen University
Speaker(s): Kai Xu Lintao Zheng, National University of Defense Technology; Shenzhen University
3DLite: Towards Commodity 3D Scanning for Content Creation
Summary: We present 3DLite, a novel approach to reconstruct 3D environments using consumer RGB-D sensors, where our goal is to directly utilize captured 3D content in graphics applications, such as video games, VR, or AR.
Author(s): Jingweih Huang, Stanford University
Angela Dai, Technical University of Munich, Stanford University
Leonidas Guibas, Stanford University
Matthias Nießner, Stanford University, Technical University of Munich
Speaker(s): Jingwei Huang, Stanford University

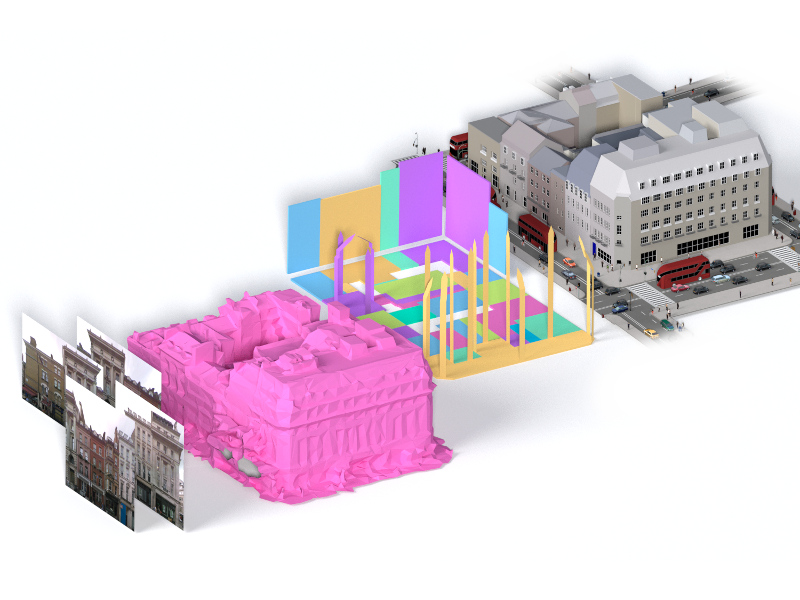
BigSUR: Large-scale Structured Urban Reconstruction
Summary: Recent advances in acquisition techniques and processing algorithms have resulted in large scale imagery and 3D polygonal reconstructions, but such data is typically noisy and incomplete. In this work, we fuse GIS, mesh, and image data to reconstruct structured urban environments at the city-block scale.
Author(s): Tom Kelly, University College London
peter wonka, KAUST
niloy mitra, University College London
john femiani, Miami University
Speaker(s): Tom Kelly, UCL